关于这个项目
个人很喜欢打乒乓球,想当年高中的时候每天中午挤出午休时间在学校挥洒汗水,睡午觉是不可能睡午觉的。但是上大学以后打球的时间就比较少了,一是由于学习工作时间有限,二是学校里球友越来越少,很少碰到水平相当又志趣相投的同学了。
记得去年在网上看到一个kuka机械臂跟波尔对战的视频,虽然说这个视频是kuka推的广告,也有充分的摆拍嫌疑,但是我觉得让机器人打乒乓球其实还是非常可行的。毕竟乒乓球不像围棋之类的智力竞赛,打乒乓球并不需要很高的人工智能水平(心机婊机器人选手不算😉),而是对机电控制水平要求较高(高速度,高精度),这方面已经有了工业机器人行业这么多年的积淀,应该说难度并不是非常大的,最大的难点在于视觉算法。
KUKA机械臂对战波尔的视频↓
当然了,工业机械臂属于重型装备,价格也不是一般消费者能承受的起的(数十万以上),如果要想实现一套低成本的类似设备,我归纳了一下,大致需要如下几个功能模块:
- 高速双目视觉系统
- 自由度机械臂(可用舵机,降低成本)
- 高速移动滑台(类似雕刻机的导轨,用于快速移动,因为舵机的响应速度不够所以需要这一项来补偿)
- 一套巧妙的算法
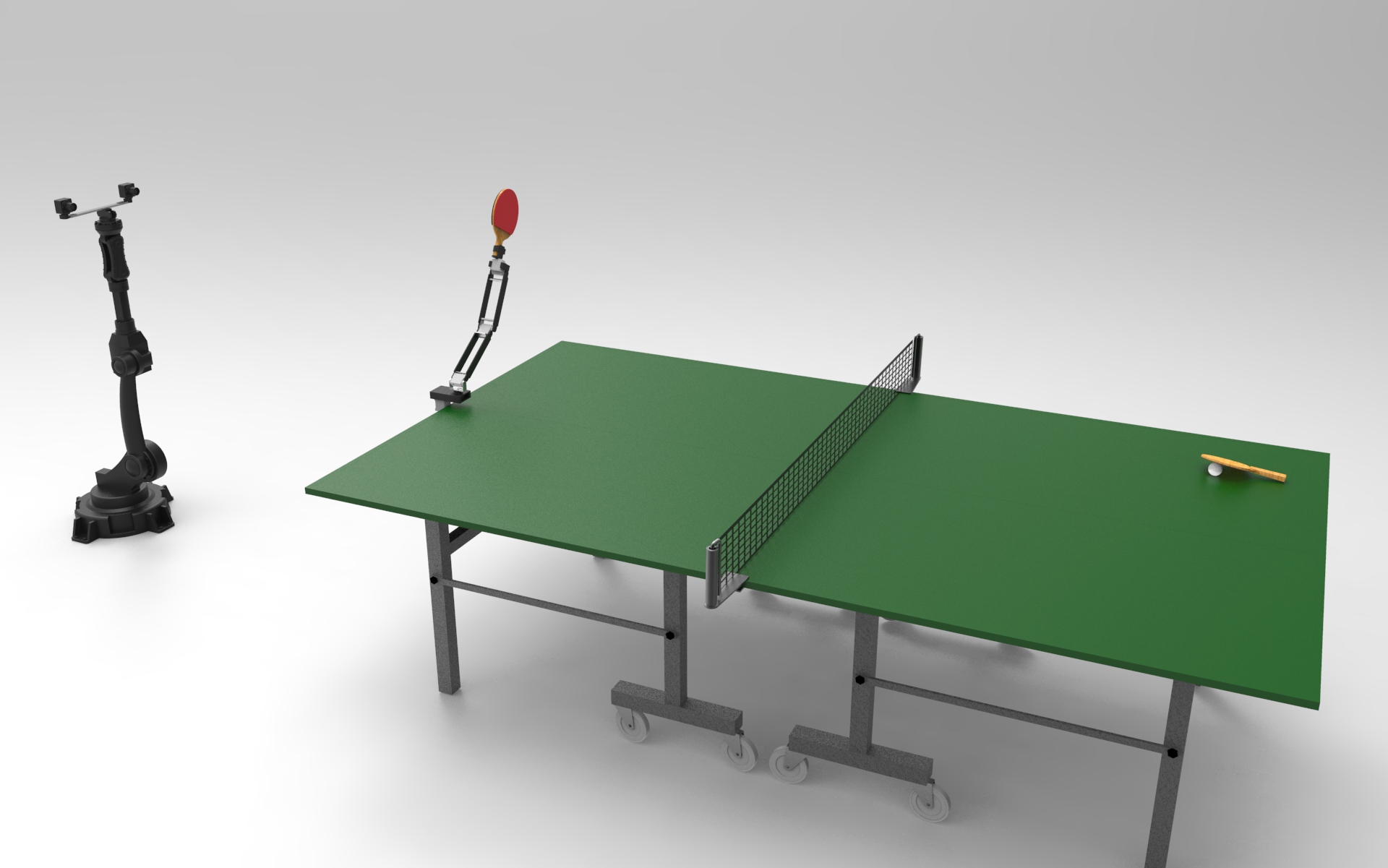
更详细一些来说,我们先要使用两个高速相机组成双目视觉系统,用来实时捕获乒乓球的位置和速度,并计算出预判的击球点位置和速度,然后控制机械臂和滑台快速移动到击球点准确击球。整个循环过程的周期将不会超过10ms,考虑乒乓球的运动速度可以达到7m/s左右,10ms的时间足够使其运动7cm了,所以对于预判来说,高速的摄像机是必须的。**
技术路线
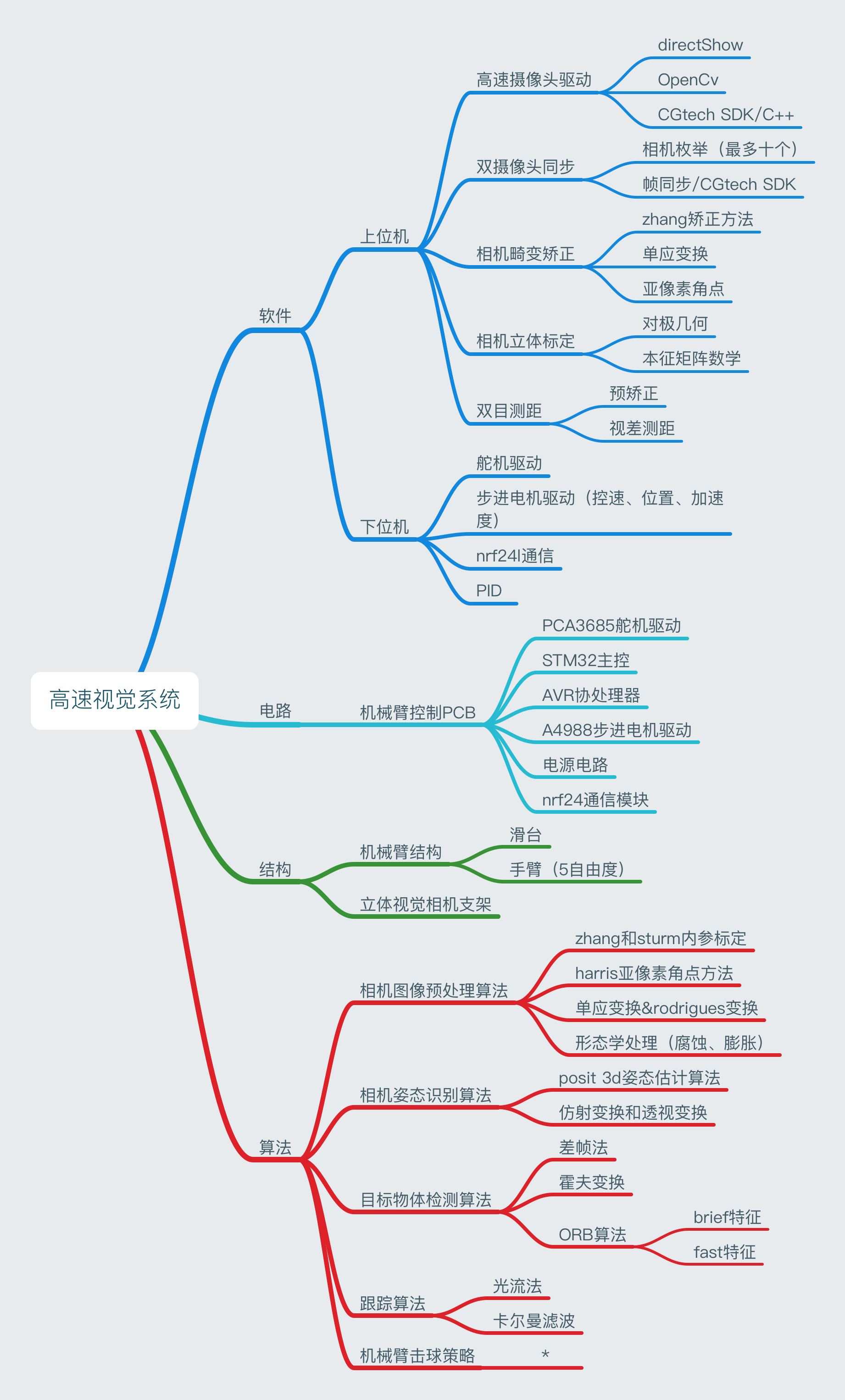
具体的技术路线我总结如下,其中击球策略要等到硬件软件框架完成后再实际确定,实际方案也会在边研发的过程中边修改,后面就是逐步实现导图中的功能了。
项目动态(未完结)
2017.4.25
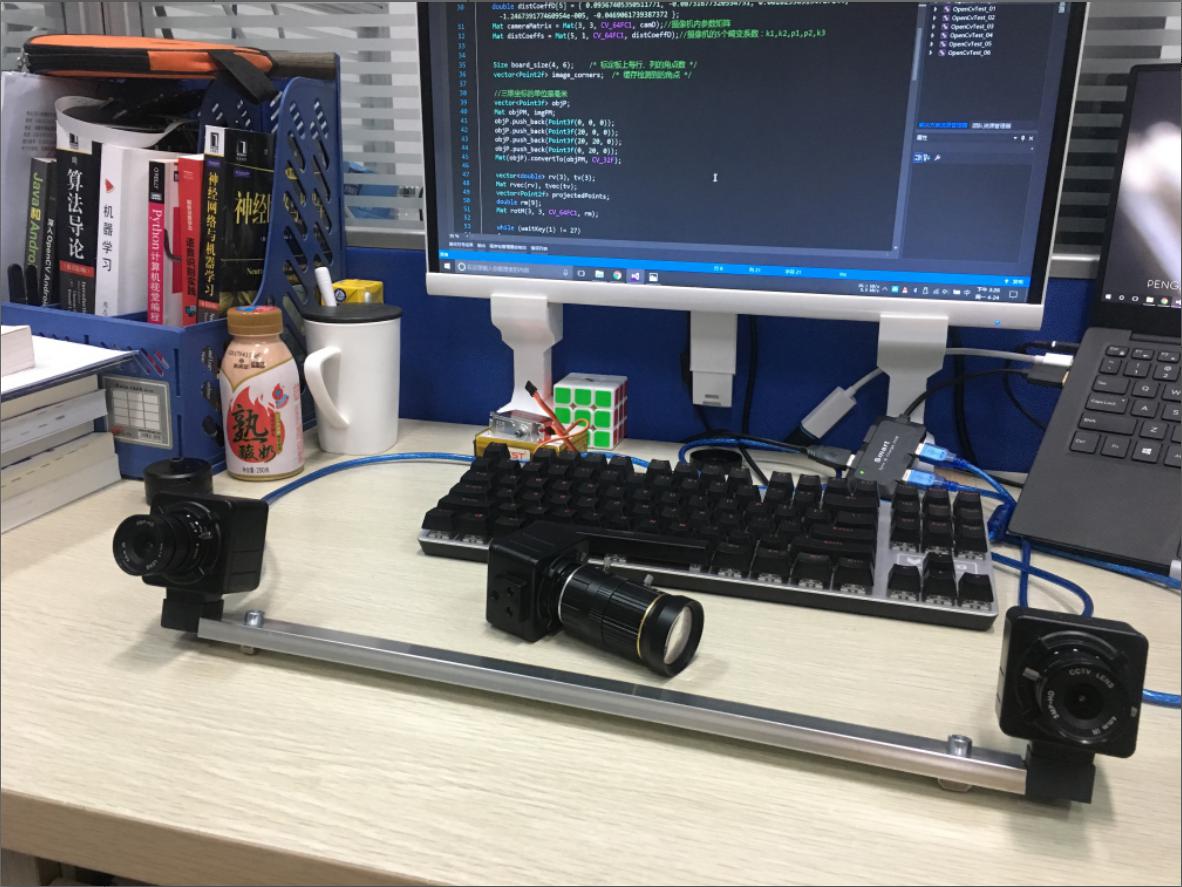
目前高速摄像头已经到位,我选择的是某款工业摄像机配合广角镜头,帧率可以达到320fps,应该说对于本项目是非常理想的😘(不过根据测试该相机的驱动稍微有些复杂,由于并不是免驱摄像头,特别是同时开启两个摄像头的情况下需要定制一些驱动,好在这个问题我已经解决)。
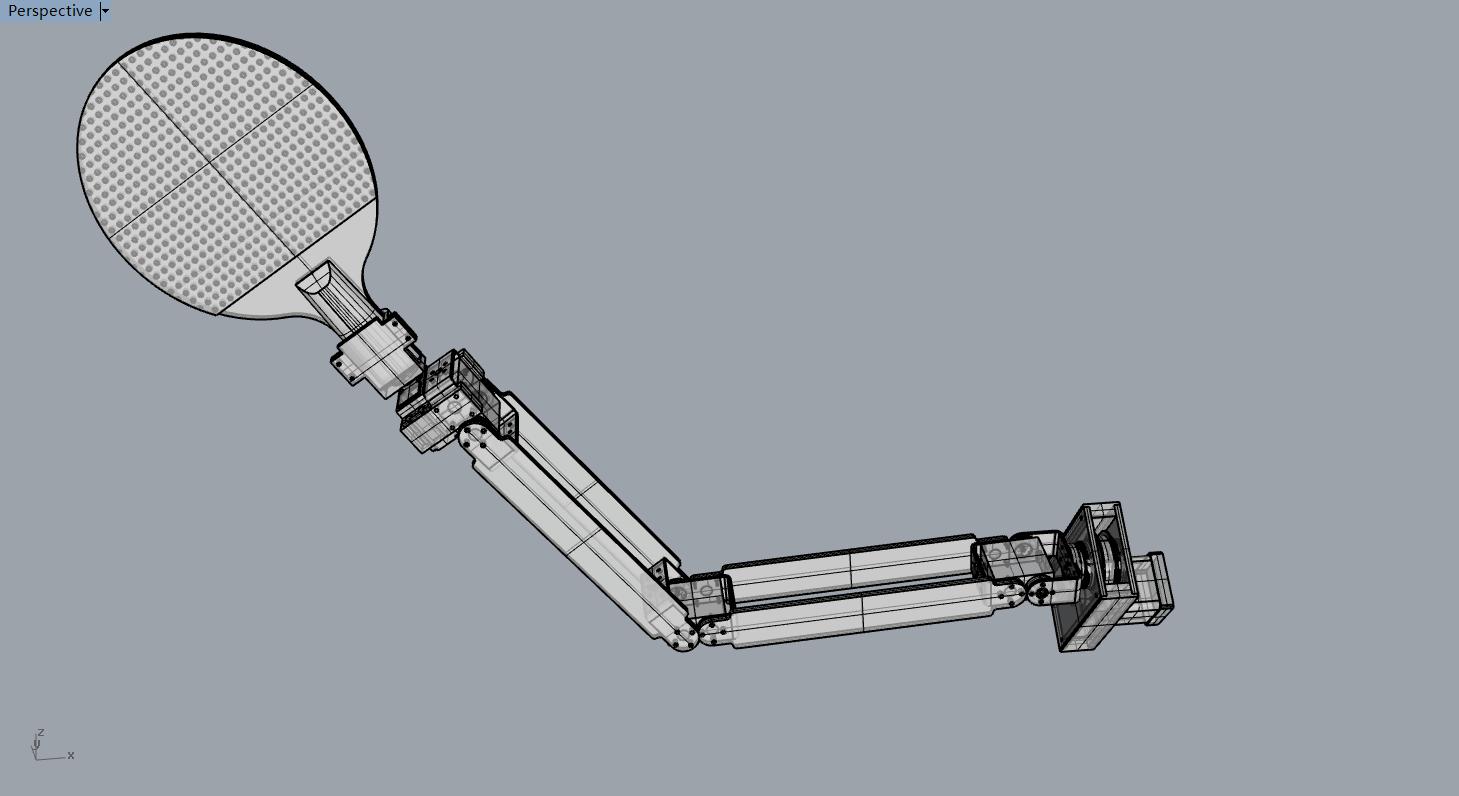
然后机械臂的设计也已经基本完成,使用四个舵机加一个步进电机驱动,下一步是进行相关金属件的加工和3D打印
2017.4.27
加工的机械臂零件基本都到了,把机械臂组装了一下。经简单测试,很可惜底部舵机的力矩不够,准备换用更大力矩的型号,顺便改进一下结构。

2017.4.29
双目视觉方面,相机的立体标定和重投影计算已经完成了,各种投影坐标变换还是有点复杂,做了个可视化的demo,视频中标定板的三维坐标被摄像头定位并实时显示到3D场景中。这里有少许延迟是因为通信原因和渲染耗时,另外显示器的刷新率也只有60hz所以本身是无法显示高速图像的,最终应用到系统中时帧率会控制在150fps左右,延迟在ms级。
下一步是着重解决乒乓球识别的问题,用传统机器学习或者神经网络的方法当然是可以很好地识别物体,但是运算量的开销是本系统所无法承受的(即使提前训练好模型,一帧运算时间也差不多在秒级别),所以肯定还是寻求更加简洁有效的识别算法,比如光流,差帧等;一个更麻烦的问题是,除了识别乒乓球,还需要识别机械臂和人,因为在摄像头机的视野中,这些东西都是在运动的,而乒乓球是其中最小的物体,所以如何做好滤波算法也非常重要,类似卡尔曼之类的跟踪器是很有必要被引进的。
|
|
2017.5.4
劳动节光荣地放了几天假~
机械的金属件都加工完成了,机械臂已经组装好,更换了结构和舵机之后力矩已经满足要求,速度也是没什么问题的。
在组装的时候突然想到个方案:其实可以在机械臂关节之间添加一个扭簧,用来抵消机械臂的重力,这样舵机只需要很小的力矩用来克服惯性力就行,响应肯定会好很多,下一版尝试一下这个方案。

用买的舵机驱动板试了下机械臂的效果,如图(只驱动了下面两个舵机,末端的舵机没有上电,因为舵机板只有两个输出)。
另外,机械臂的控制电路部分,PCB已经画好了正在打样,估计下周就能撸起来啦~
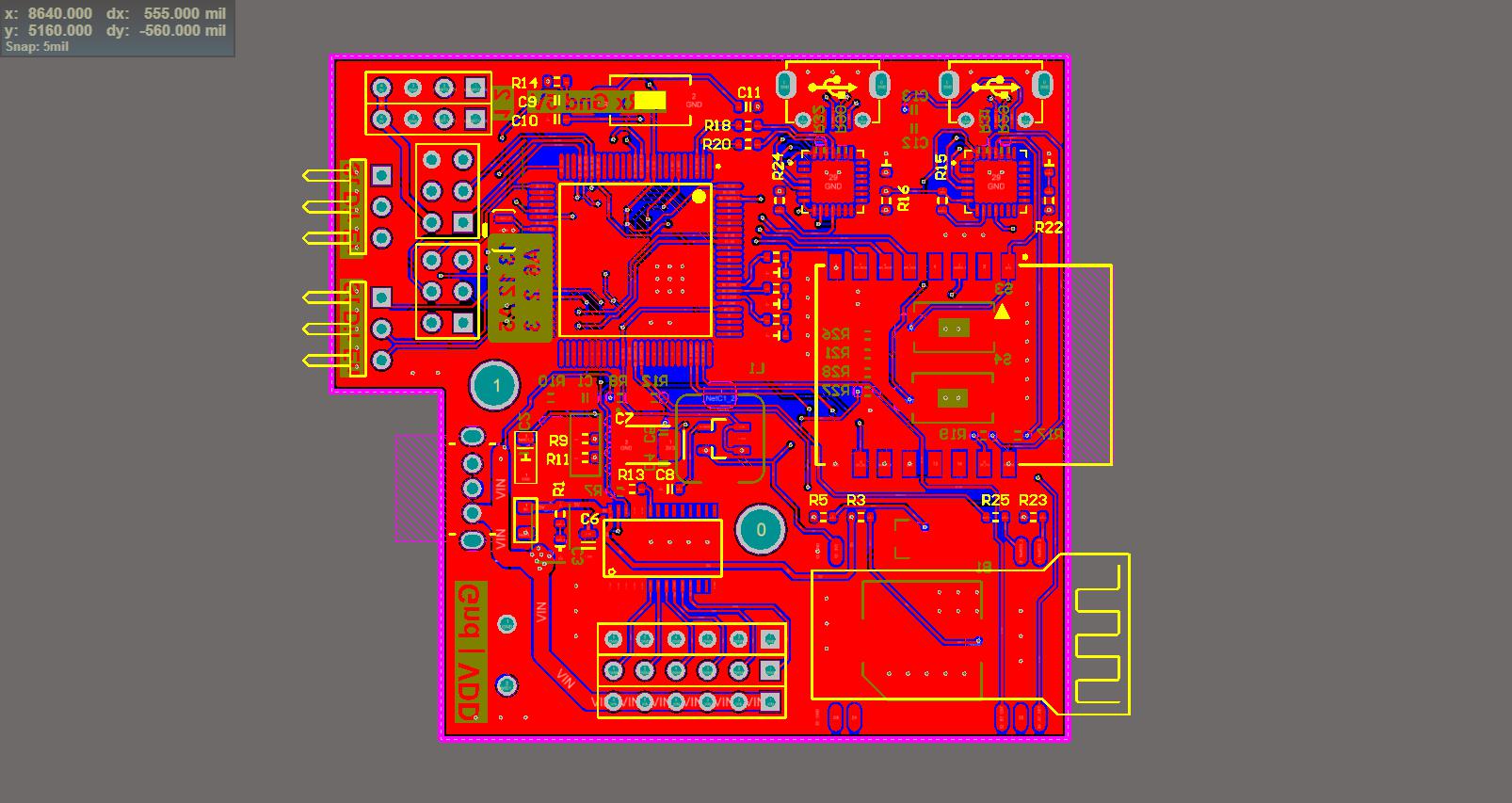
- 下位机主控电路采用的是一块STM32主处理器+AVR协处理器,因为系统对实时性要求很高,所以使用两块主控分别处理控制部分和通信部分,提高效率。
- 最底部的导轨使用的是交流伺服电机,这电机通体乌黑,摸着甚爽,输出暴力,居家创客必备啊😉

2017.5.7
继续调了下视觉算法,目前已经可以准确识别乒乓球了,偶尔有遮挡的情况也不怕;下一步是加入卡尔曼滤波,让轨迹跟踪更稳定可靠,等PCB板子来了就开始软硬件联调啦。
|
|
2017.5.9
- 整合双目和目标识别写了个3D可视化程序,跟踪效果还是不错的,这里还没有加任何的滤波算法,所以后期还有提升的空间
- 遇到的一点小问题是,由于乒乓球太小,因此当球处于远桌处的时候会变成一个小点,这时候可能会被当作噪声被滤除…解决这个问题有几个思路,一是添加形态学处理,也就是膨胀,这样可以在不改变目标中心位置的情况下扩大目标面积,二是靠观察器跟踪球的位置,简单的说就是现实物理世界中的运动一定是连续的,这样在摄像头帧率足够高的情况下,得到的相邻两帧的距离不会太远,基于这个先验知识就可以判断出噪声和球的区别了。
|
|
2017.5.10
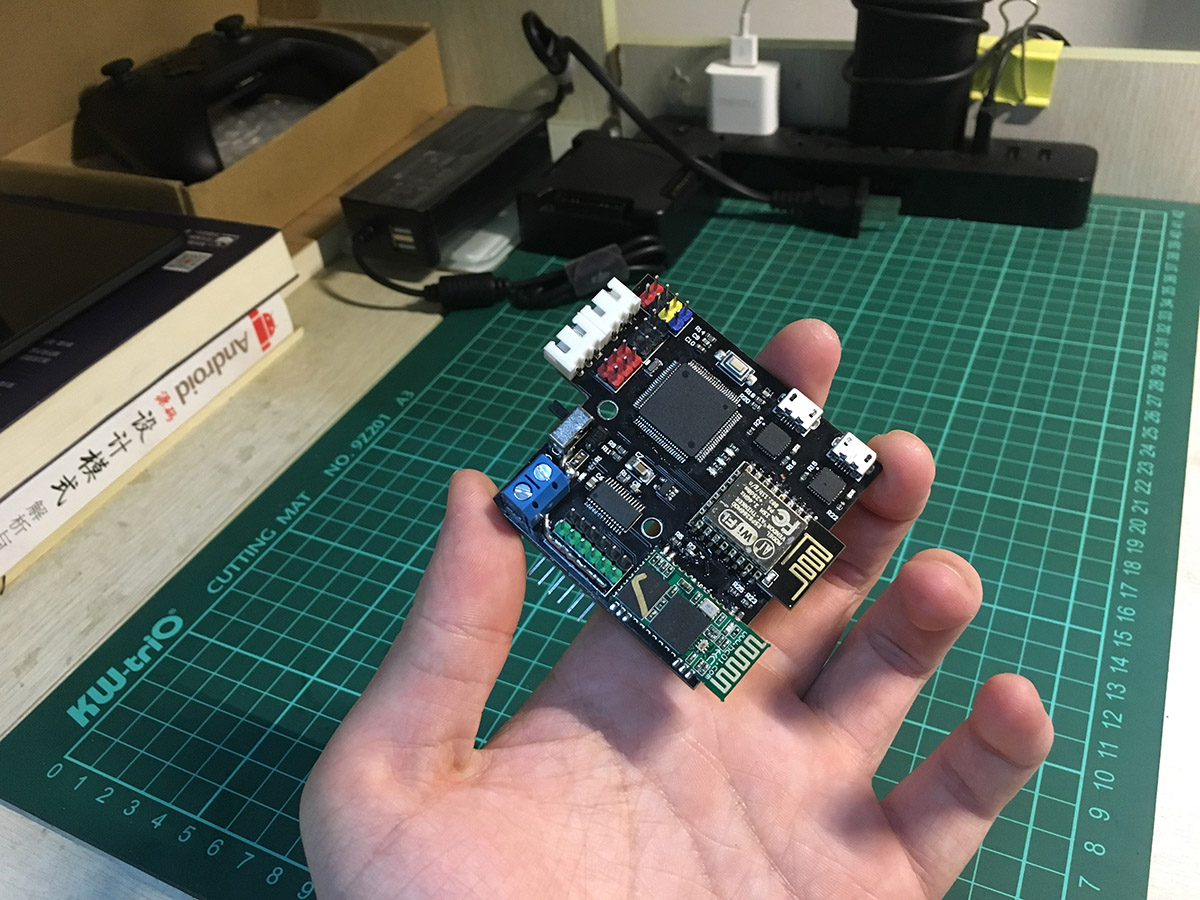
PCB到了,迅速焊了一片样板,主控采用的是STM32主处理器和一片Arduino作为协处理器;经过一番惊心动魄的测试,除了钽电容焊反放了次烟花以外,其他部分都工作正常。。
2017.5.11
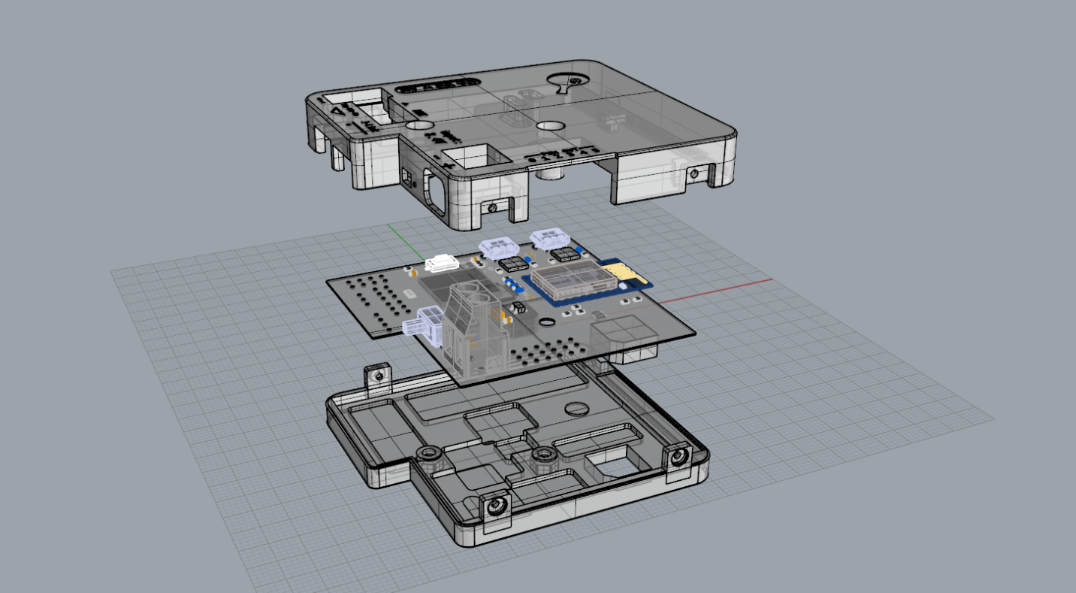
偷个懒。。。不务正业做了个主控板外壳,正在SLA打印中↓

2017.5.19
有点其他事情忙耽误了几天,重新开始续更啦~
光固化打印好的主控外壳↓

昨天测试了一下焊好的驱动主控板,板子倒是没什么问题,驱动,通信各部分都正常。拍了个演示视频,到时候会实时同步电机运动状态到3D场景中,方便记录数据进行场景重放,好定量分析参数的影响。
|
|
伺服电机还是很给力的,响应速度和扭矩都不错。不过头痛的是,上面的机械臂效果还是没那么理想,虽然之前已经更改过一次结构,但是测试中快速运动的时候还是容易出现震荡的情况。
无解,继续改结构吧。。。
2017.6.6
最近事情太多了。。不过还是有些小进展的,机械臂改版马上就完成了;视觉算法改动较大,翻看了不少国内外视觉跟踪相关论文,产生了一些新想法,经验证还是很有效的,进一步增强了鲁棒性,看视频效果↓
2017.6.9
机械臂改版完成了,新版设计把几乎所有舵机多下置到底部,通过同步带传动,小伙伴帮忙设计的新结构,非常给力~
这样设计好处有很多:
首先降低了机械臂负重,可以减轻舵机扭矩需求
其次由于装在底部空间足够,可以换用更大型号的舵机
最后由于使用同步带和同步轮传动,可以在同步轮出再加一级减速,进一步增大力矩,减小惯量(和减速比的平方成反比)
总的来说现在力矩是完全足够了,速度也比较理想,看视频:↓
机械臂主要负责垂直方向的运动,而水平方向则由更为灵活的高度滑轨实现,现在滑轨还在加工,预计过几天就可以完全组装好了。
2017.6.11
导轨加工完成,速度飞快;机械臂可能还需要大改,脑阔疼…
2017.6.13
整合各个模块,简单写了个导轨跟踪程序测试了下,效果还是不错的,下一步是优化速度,加上轨迹规划函数减小抖动
结合硬件控制的效果,机械臂还有些问题待改进,这里只控制滑轨的运动
2017.7.12
重新搭建了整个实验环境,另外加上了简单的滑轨&手臂协同动作指令,效果还不错,但是受限于舵机机械臂的响应性能,目前其技术水平只能约等于人工智障吧~

