上一次做磁悬浮应该是大二时候的事情了,那时参加学校的一个电子设计竞赛,做的控制组的题目,就是下推式的磁悬浮装置(结果做的还不错拿了特等奖:D),做完之后我就把项目给开源了,原帖子发在极客工坊和Arduino中文社区。

当时是用的Arduino来做的这个项目,用过Arduino的都知道,它是没有定时器中断的,所以在控制项目中,哪怕是很简单的PID算法,都是无法做到精确地固定周期运行。当然Arduino也有它的好处,就是利用各种方便的库函数进行快速的原型验证。整个装置其实并不复杂,不过是需要控制几个ADC读取霍尔传感器,输出几个PWM控制线圈,中间加点控制算法而已。经典如PID,对于这种低阶系统其实完全够用了,所以当时经过参数的优化之后,整体的运行效果也还可以接受。
但是毕竟Arduino性能有限,运行一些复杂点的算法还是力不从心,而且最明显的缺点是,其PWM频率恰恰是490Hz(有几个口是980Hz,也有第三方库可以改),不偏不倚就是人耳听觉范围最灵敏的频段,也因此整个装置运行时会发出谜之噪音,容易引起强烈不适!😠
那这一次为什么又重新捡起这个项目呢,因为这是今年ST峰会那边邀请我帮忙设计的一个技术展示方案,在上个月的峰会演讲中有介绍这个项目的具体技术实现。


那么首先这次做的有两个方向,大家都知道磁悬浮分为上拉和下推两种,前者靠一个顶部线圈控制浮子悬浮,而后者则是靠四个线圈控制浮子。
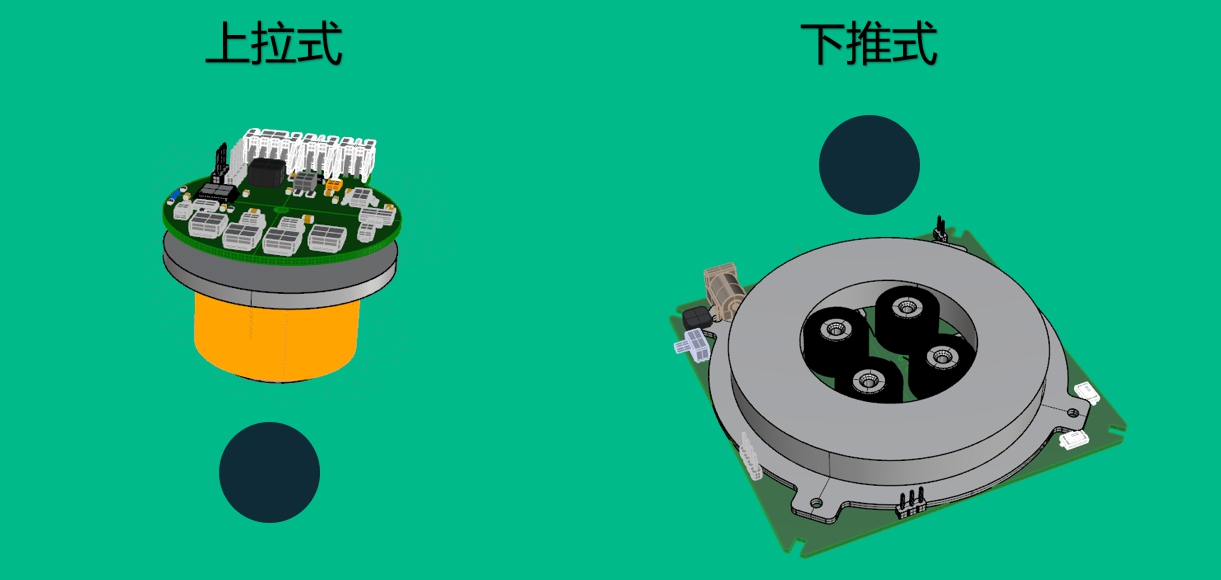
其中下推式的由于我之前就做过也有教程,这里就不详细介绍了,重点说一下上拉式的一些特性,相比于那时候的程序只用了PID来控制线圈,这次由于经验丰富了,采用了更复杂的控制算法,最终的悬浮效果非常理想,主要来说,这次这个装置有以下几个特点:
- 悬浮更稳定,几乎看不出浮子有任何抖动,这归功于改进的LQR控制算法
- 几乎零噪声,上面说了,由于Arduino的pwm频率为490Hz,这是在人耳的听觉范围内的,所以可以听到之前的装置工作时会发出刺耳的声音,而这次将pwm频率提高到了20kHz,且控制算法进行了内插滤波,所以噪声几乎被消除了
- 功耗得到了极大的控制,整个装置异常省电,是的你没听错,磁悬浮是很省电的,还是由于改良的控制算法,使用了多个闭环控制,其中包括一个电流环,也就是说算法会调节浮子到一个合适的位置,而这个位置的磁力(不包括线圈的力)是和重力完美平衡的,这样就让磁力抵消了几乎所有的重力,线圈只需要在这个平衡点附近,进行极其轻微的调整,因此电流是非常小的,实测待机电流30ma,加上浮子工作的电流50ma,也就是说线圈消耗的电流只有20ma左右,甚至跟单片机的功耗差不多
- 浮子重量大大增加,这个装置最大可以悬浮多大的浮子呢?大到夸张,2kg左右都没问题,这是由于上面那一点,电流环的加持,不管浮子多重,其重力都会和磁力相平衡,只不过浮子越重,最终平衡的位置就离线圈的铁芯越近而已。更有意思的是,不管浮子多重,最终的功耗是不会变的,都是50ma左右,因为平衡点附近所需要的线圈磁力非常小
- 这也是很有意思的一点,装置可以实现断电浮子自动上吸。在实际应用中,断电的时候,浮子如果掉下来可能会损坏挂在上面的物品,所以有必要实现断电的自动上吸。但是,照理说,断电的时候,单片机都不工作了,怎么还能控制浮子呢?如果不控制,由于浮子是稳定在平衡点附近,那么断电时候上吸还是下落完全是随机的啊,怎么保证百分百上吸呢?答案是,不让它工作在平衡点附近,也就是说,让它工作在平衡点上面一点点,这样的话,实际上线圈所提供的不是吸力,而是斥力来使得浮子平衡,于是一旦断电,斥力消失,浮子就自己上吸啦。这也是为什么,待机电流30ma,而工作电流有50ma的原因,其中20ma被用于线圈提供斥力了。实际上,如果不要求这个功能的话,线圈的功耗几乎可以降至0!
- 也是最核心的一点,所有的参数都是自整定的,所以可以自适应浮子的重量
|
|
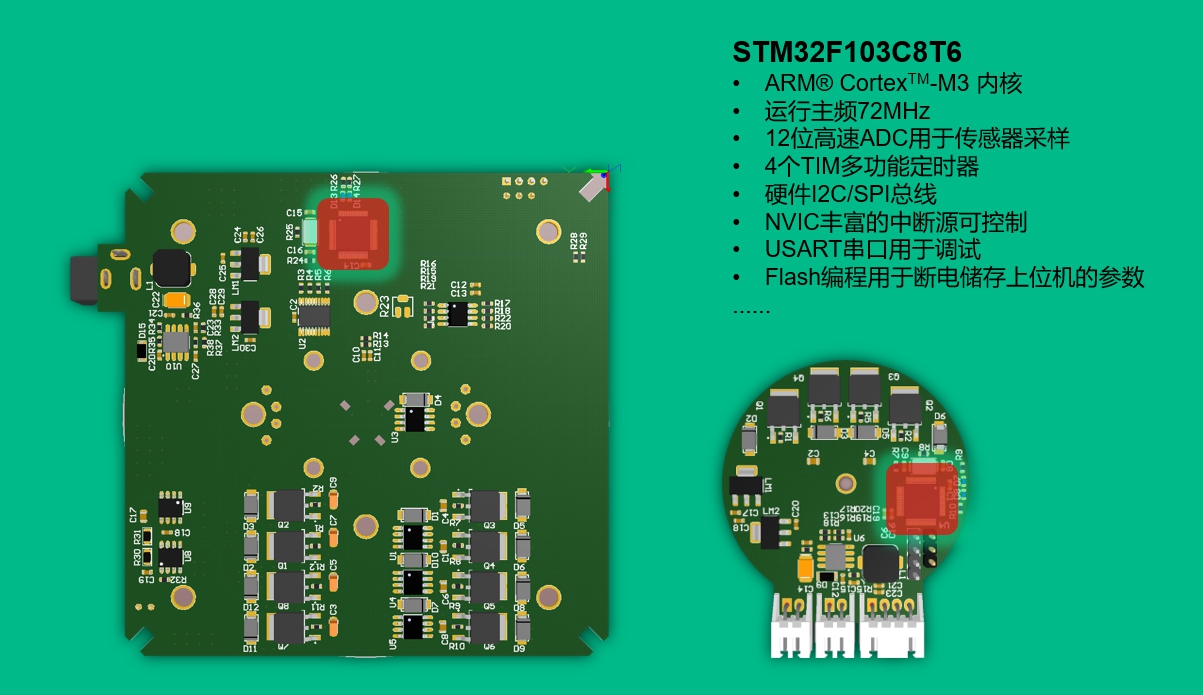
这次的主控换成了性能强很多的STM32,F1系列非常常用的型号
继Nano的两轮自平衡、ONE的独轮自平衡、四轴的无轮自平衡之后,加上这次的磁悬浮“莫名其妙自平衡”,New Balance系列就算是齐活啦~