前言
关于相信机械臂大家应该都了解过,小到3D打印机、激光雕刻机,大到工厂里使用的工业机械臂,都是机械臂控制的典型应用。随着工业4.0时代的到来,机械臂这样一类最典型的“机器人”,正在逐渐服务于我们生活的方方面面。
X-Bot就是这样一个机械臂作品,确切地说它是我另一个AI项目的先导作品,由于之前看paper发现一个很有趣的条件生成式对抗网络(CGAN)模型,所以产生了一些脑洞准备动手结合硬件造一个AI灵魂画手。既然是画手,光有AI算法当然还不够传神,所以X-Bot就应运而生了,当时也考虑过好几种机械臂方案,最终选择了CoreXY结构作为X-Bot的设计方案。
关于机械臂
那么CoreXY结构是什么东西呢?
首先我们来了解一下目前比较流行的机械臂结构有哪些:
最经典的XYZ结构


这一类结构大家应该一眼就能看明白是怎么回事,简单说就是在X、Y、Z三个方向上都是独立的直线运动,虽然形式有多种比如图中的第一种被称作龙门式,一般在雕刻机领域用的很多;而第二种在比较追求小型化的3D打印机上经常可以看到其身影。
XYZ结构的好处就结构非常简单,控制也很简单,由于三个方向上的运动都是解耦的(一个方向的运动不会影响到另一个方向),而且相对来说由于是纯线性驱动,其运动精度会比较容易控制。
DELTA结构
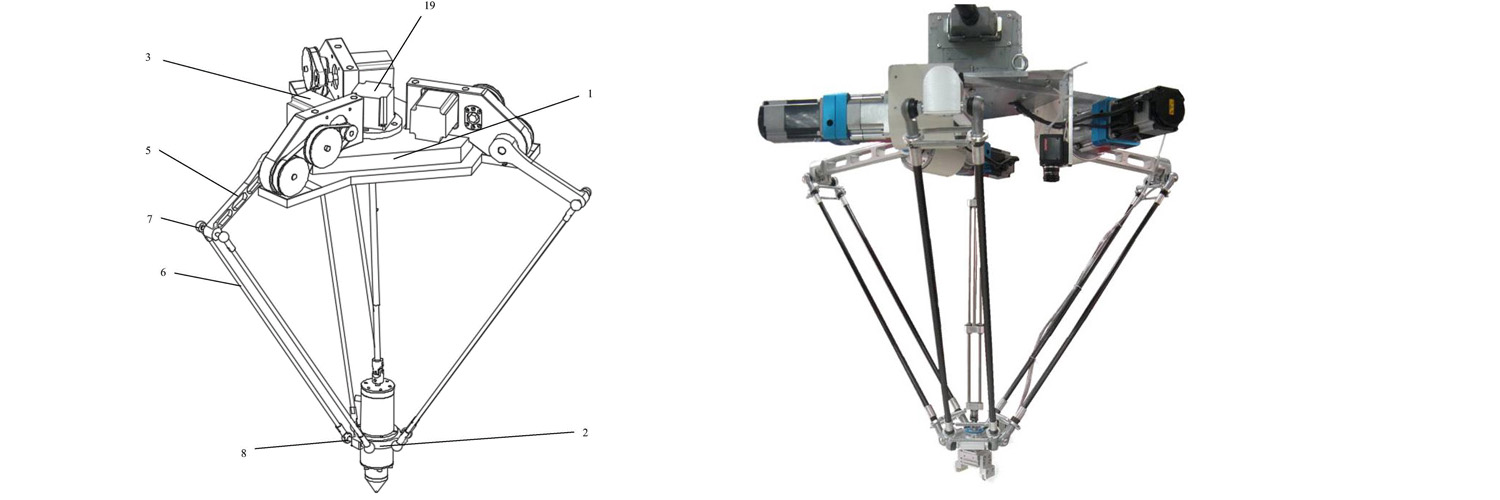
由于我们身处三维空间,因此来说只要是三个线性独立的向量都可以用来表征空间中一个唯一的坐标,对应于机械臂中,就是说只要我有三个可以精确驱动控制的电机,我就可以玩出各种花样让一个机械臂精确地运动到某一点。在XYZ结构中,X、Y、Z三个电机的地位并不是对等的,而DELTA结构则以一种很巧妙的方式完全对称地放置三个电机,如上图所示。通过三根连杆两端一共六个万向关节的约束,DELTA机械臂的末端可以运动到三维空间中的任意一点(在行程范围内,且行程空间并不是和XYZ结构一样的一个立方体),这种结构的好处就是非常的炫酷,哈哈,其实几年前个人最早决定设计自己的3D打印机的时候,就对DELTA结构非常的热衷~由于杠杆效应,一般来说这类机械臂的运行速度都要比XYZ要快一些,同时由于非线性控制坐标解算需要消耗更多的计算资源,有兴趣的同学可以去了解一下DELTA结构到XYZ坐标的解算公式推导过程。
圆柱结构
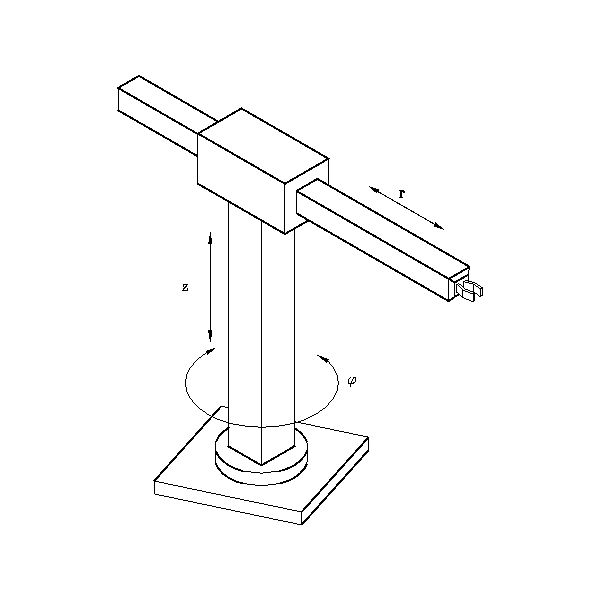
提到XYZ大家首先想到的是笛卡尔坐标系,然而我们在中学的时候就学过另一种坐标系叫极坐标系,也就是用一个角度和一个长度就可以表征平面内一个点的坐标,而且其跟XY坐标的转换也很方便。那么讲极坐标系再加上一个Z轴的直线运动,就得到了这样的圆柱结构机械臂。这类机械臂在实际应用中见到的比较少,因为同为极坐标结构,下面这种SCARA结构有着更“拟人”的效果。
SCARA结构
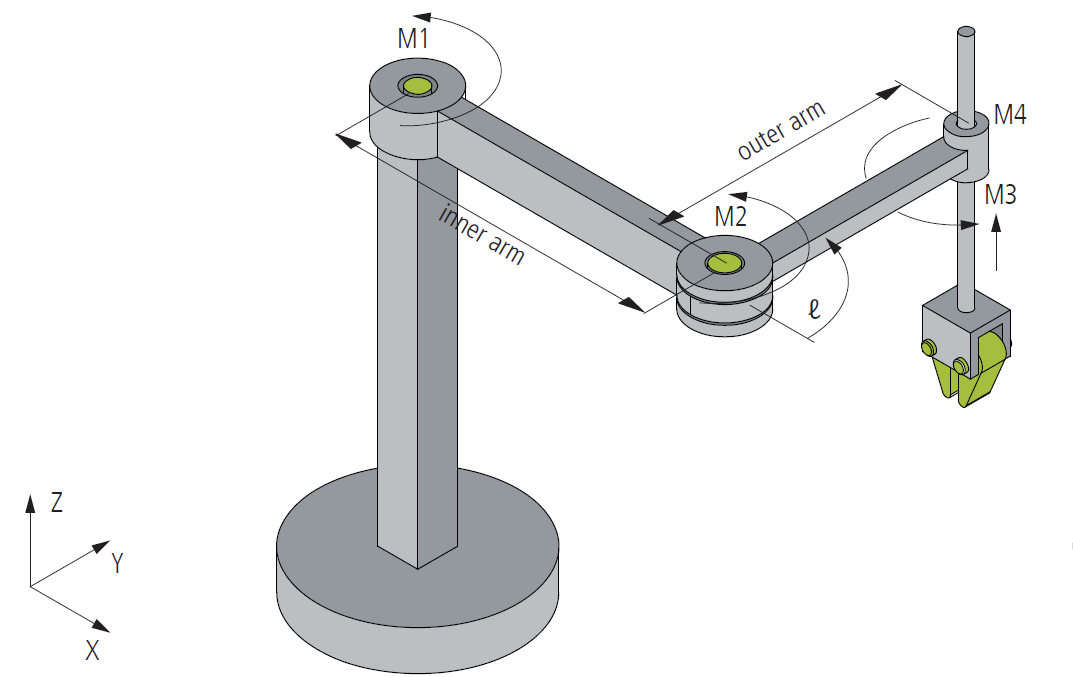
这一类机械臂的结构非常像人类手臂(虽然自由度差了很多,人手臂应该是7个自由度),优点很明显就是节省空间,缺点也很明显,由于远端的误差放大作用,对于电机角度控制的精度要求非常高,电机的一点点抖动传递到末端都可能造成很大的误差,因此在工业机械臂中,这类机械臂一般都是使用传动误差极小的谐波减速器。
CoreXY结构
其实关于机械臂的结构还有各种各样,结构设计师们的脑洞实在是让人叹为观止,有兴趣的小伙伴可以去google一下国外的各种3D打印机作品,非常的有意思。这里只最后介绍一下X-Bot中采用的CoreXY结构。
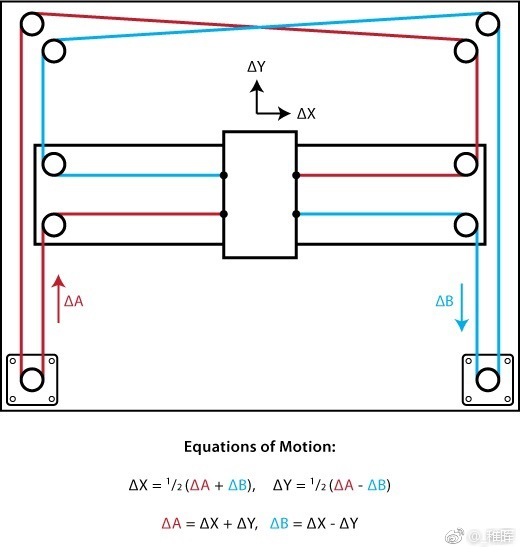
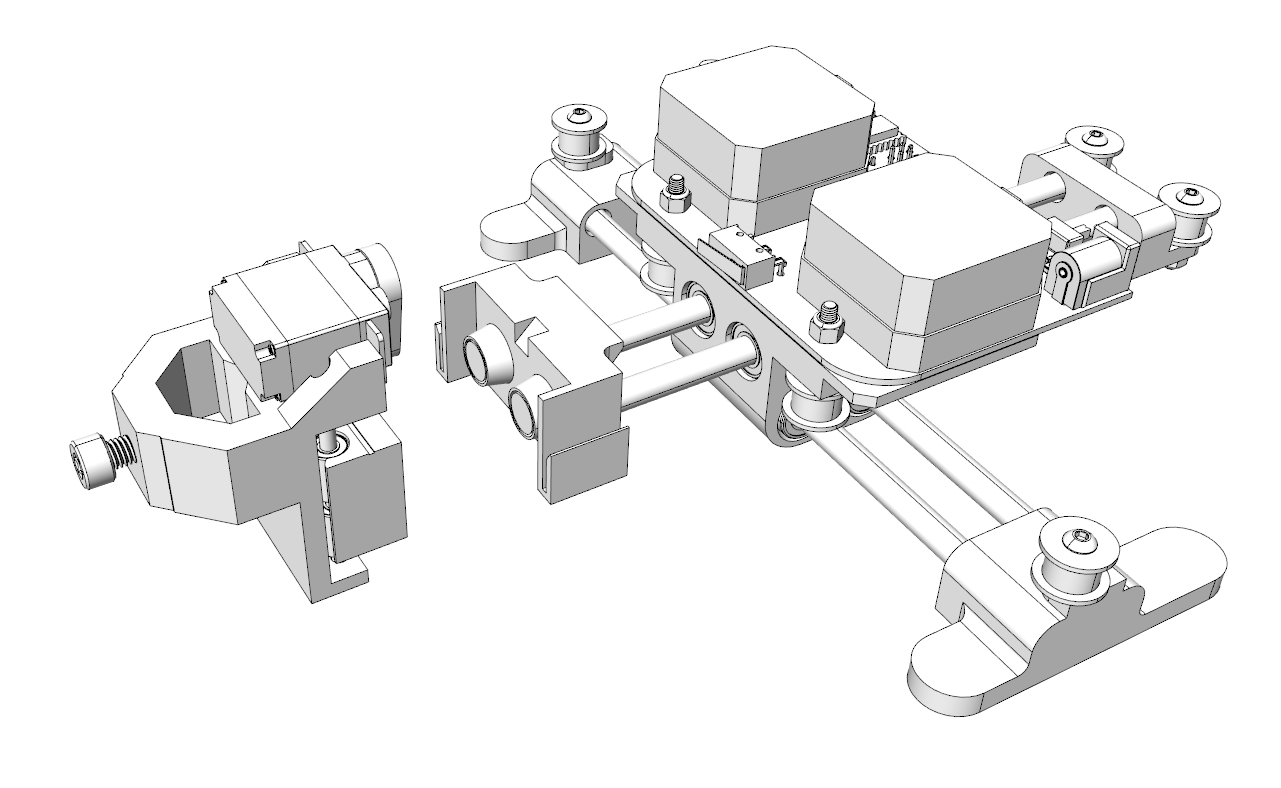
与传统XY结构不同,CoreXY是一种仅使用一根同步带就可以控制末端在XY两个方向运动的结构,非常巧妙;但是和绝大多数其他结构一样,CoreXY这种结构也会有电机和限位开关分散分布,电路连接走线比较麻烦的缺点;于是在其基础上,X-Bot改变了电机放置的位置,将其由两边放置改为中央放置,所有的电路板和电机集中布置,结构更紧凑。
|
|
电路设计篇
待续…

